
GNSS
A Global Navigation Satellite System (GNSS) is any satellite system that provides positioning, navigation or timing services. While commonly used to refer to any satellite-based location or navigation technology, GPS specifically refers to the Global Positioning System, the GNSS run by the United States and one of several GNSS constellations in orbit.
Constellations
GNSS constellations are coordinated groups of satellites maintained by different governments and organizations. These constellations operate separately, but many receivers can receive signals from multiple constellations. There are several in operation:
| System | Operator / Coverage Area | Active Satellites | Altitude / Orbit Type |
|---|---|---|---|
| Global Constellations | |||
| GPS | United States (DoD / Space Force) | 31 operational (24 core) | 20,200 km (MEO, 6 orbital planes) |
| GLONASS | Russian Federation | 24 operational | 19,140 km (MEO, 3 orbital planes) |
| Galileo | European Union (EUSPA) | 30 operational | 23,222 km (MEO, 3 orbital planes) |
| BeiDou (BDS) | China | 58 operational (BDS-3) | Mixed (GEO, IGSO, and MEO) |
| Regional Augmentation Systems (RNSS) | |||
| QZSS | Japan & Asia-Oceania | 5 | Inclined, Geosynchronous (IGSO) |
| NavIC | India & Indian Subcontinent | 10 | Geostationary (GEO) & IGSO |
All GNSS communication takes place in the L-band, a frequency window of the microwave and radio spectrum. This band is used because light waves at these frequencies travel well through the Earth's atmosphere.
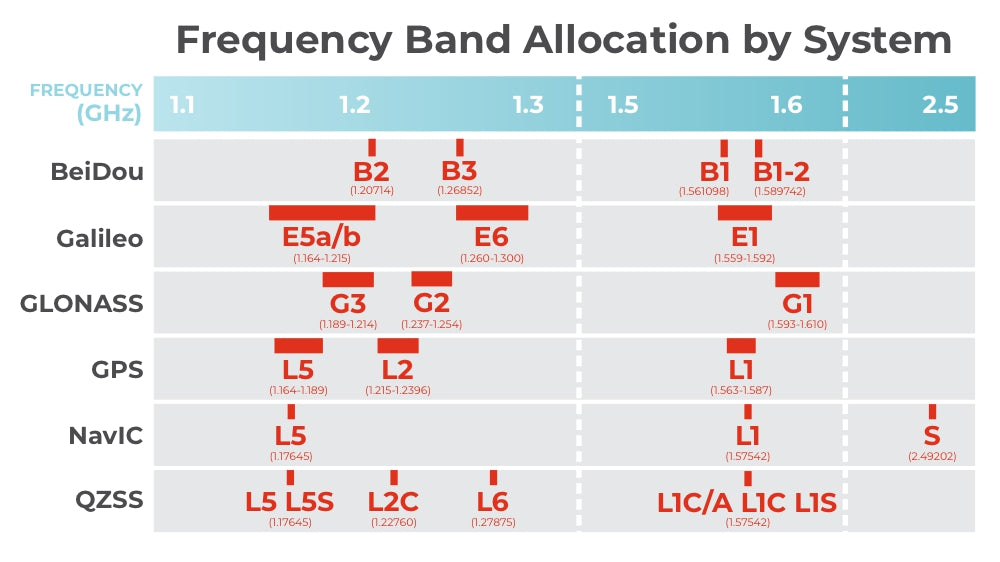
To prevent interference, international agreements and regulatory bodies coordinate frequency allocations. Through a system of shared standards and monitoring, GNSS constellations operate side-by-side with minimal interference. Many GNSS receivers can pick up signals across multiple frequencies and constellations to provide highly reliable, accurate positioning.
To find out more about the history of satellite navigation and why we use the frequencies we do for GNSS communications, check out this article:
How GNSS Works
Every GNSS satellite is constantly sending out signals that include the exact time of the signal and the satellite's known location. The receiver does the work with that information to determine its own location in relation to the satellites. It needs to be in view of at least 4 to calculate an accurate location.
GNSS receivers use a mathematical technique called trilateration to determine the exact position of a receiver. All signals between satellites and receivers travel at the speed of light, and each signal includes the exact time of transmission. The receiver uses the information in each satellite's ping to compute how far away it is, as the satellite-receiver distance is equal to the distance light travels between the timestamp on the satellite's signal and the exact time the receiver gets the signal.

Trilateration
Every GNSS satellite already knows its exact location. When only receiving signals from 1 satellite, all a receiver can do with that information is know its current location lies somewhere on a circle centered around that satellite with a radius equal to the satellite-receiver distance. With the addition of each new satellite's satellite-receiver distance information, the possible locations of the receiver become more resolved by mathematically finding the intersection points between the circles centered on each satellite.
Satellites know their exact location through a list of known parameters known as ephemeris, but they don't figure out this information for themselves.
Ground stations on earth keep careful track of satellites and use a combination of orbital dynamics, radar, signal doppler, laser reflectors, and orbital dynamics to determine a satellite's exact location. They then supply that information to the satellite, which then beams it out as part of its outgoing signal.
When a satellite transmits a signal, it is broadcasting its current position and current time. When the receiver gets that signal, it does the computation necessary to determine its own location. These ground stations are an integral part of satellite positioning systems, and without them we wouldn't be able to get precise data.
Why is a fourth satellite needed?
In real life, these calculations are taking place in four dimensions, not three. This means that the circles created around each satellite with a radius equal to the distance between that satellite and the receiver are actually spheres. A fourth satellite is needed for two reasons; to resolve the final location from the two intersection points of the three spheres, and to supply an accurate time reference for the GNSS receiver, as their clocks are not as advanced or accurate as the atomic clocks on board the satellites.
Satellite Signals
We know what information a GNSS signal contains, but what's in the signal itself?
Sources of Error
There are several sources of inaccuracies in GNSS positioning. Some of the common sources include:
- Atmospheric Delays: GNSS signals can be delayed or distorted as they pass through the Earth's atmosphere. Factors such as ionospheric and tropospheric conditions can introduce errors in the signal propagation, leading to inaccuracies in positioning.
- Multipath Interference: Multipath interference occurs when GNSS signals reflect off surfaces such as buildings, trees, or other obstacles before reaching the receiver. These reflected signals can interfere with the direct signals, causing errors in the position calculation.
- Satellite Orbit Errors: GNSS satellites have predictable orbits, but there can be slight deviations from their ideal paths. Inaccuracies in satellite orbit determination or clock synchronization can introduce errors in the positioning calculations.
- Receiver Errors: GNSS receivers themselves can introduce errors due to imperfections in the receiver hardware or software. These errors can arise from signal processing, noise, or calibration issues within the receiver system.
- Geometric Dilution of Precision (GDOP): GDOP is a measure of the geometric configuration of satellites relative to the receiver. Poor satellite geometry, such as having satellites clustered in one area of the sky, can result in higher positioning errors.
- Signal Obstruction: Buildings, trees, and other physical obstructions can block or weaken GNSS signals, leading to reduced signal quality and increased positioning errors. However, GNSS signals are not affected by clouds, fog, or even rain. The frequencies were specifically chosen to propagate through these weather events and provide accurate data in any weather or climate.
- Ephemeris and Clock Errors: The precise information about satellite positions (ephemeris) and satellite clocks is continuously transmitted to receivers. However, errors in the ephemeris data or satellite clock synchronization can impact the accuracy of GNSS positioning.
Signal Augmentation Methods
With all of these opportunities for error, it can be hard to get precise data from GNSS satellites alone. Luckily, there are techniques used in GNSS positioning to improve the accuracy of measurements.
Differential GNSS (DGNSS)
Differential corrections involve comparing the measurements from a reference station with those from a roving receiver. By calculating the differences in location data between the two sets of measurements, correction data is generated and applied to the roving receiver's measurements, resulting in improved accuracy.

Pseudoranges
Also called code-phase, a pseudorange is the apparent distance between a satellite and a GNSS receiver. It's referred to as "pseudo" because there are errors in the data at this point, most likely due to atmospheric interference or receiver clock errors.
The base station can use its known fixed location to calculate the range errors it's experiencing from satellites, then transmit those range corrections to the rover.
Real Time Kinematics (RTK)
RTK is a type of differential correction that still involves a base and rover setup, but utilizes the carrier phase of GNSS signals instead of the positional data within them. By analyzing the carrier phase, RTK can mitigate errors caused by atmospheric delays and other sources, leading to centimeter-level positioning accuracy in real time.

Carrier Phases
A fixed base station receives signals from GNSS satellites and calculates the precise number of cycles the carrier wave has taken. These carrier phase measurements can then be used to determine the exact satellite-receiver distance, which then gets passed along to the rover.
The L1 band used in GNSS has a wavelength of ~19cm. Because these are so short, using these wave cycles to calculate distance can provide higher accuracy than traditional differential GNSS. When a receiver locks onto a satellite signal, it measures the exact fraction of the wave cycle the GNSS signal is in. This can compute directly to a distance measurement; for a 19cm wavelength, a carrier phase of one half translates to a distance of 9.5cm. But how does it make this precise measurement?
Phase Locked Loops
GNSS receivers generate a reference signal at the expected frequency as the signal they're listening for, then compare the waves to determine the fractional phase of the incoming signal. In order to get a precise satellite-receiver distance, though, they also need to figure out how many complete wave cycles came before the fractional one. This is called the integer ambiguity problem.
The Integer Ambiguity Problem
Determining N, the number of wave cycles the GNSS signal has completed on its journey to the receiver, is integral to precision data. For an L1 signal with a 19cm wavelength, an offset of 1 cycle results in a 19cm accuracy error.
Precise Point Posititioning (PPP)
Precise Point Positioning (PPP) is a technique used in GNSS positioning to achieve high-precision and accurate positioning solutions. Unlike traditional differential techniques that rely on correction data from nearby reference stations, PPP leverages a global network of reference stations distributed worldwide. By utilizing precise measurements from multiple GNSS satellites and sophisticated algorithms, PPP enables centimeter-level positioning accuracy without the need for a nearby reference station.
PPP operates by processing the raw GNSS measurements from the user's receiver along with the measurements from the global network of reference stations. The reference station measurements are used to compute correction parameters, such as satellite orbit and clock errors, atmospheric delays, and other systematic errors. These correction parameters are then applied to the user's measurements to improve the accuracy of the positioning solution. PPP takes into account factors such as satellite geometry, atmospheric conditions, and signal propagation delays to achieve precise positioning results.
Satellite Based Augmentation System (SBAS)
SBAS is a regional or global system that utilizes additional satellites and ground-based infrastructure to augment and enhance the accuracy, integrity, and availability of GNSS signals. SBAS systems are designed to provide improved positioning accuracy, integrity monitoring, and availability of GNSS signals for various applications.
The primary purpose of an SBAS is to mitigate errors and enhance the performance of GNSS by providing correction and integrity information. These systems are typically operated by governmental or collaborative entities and cover specific geographical regions. Different regions have their own SBAS systems; Wide Area Augmentation System (USA), European Geostationary Navigation Overlay Service (Europe), Multi-functional Satellite Augmentation System (Japan), and the Indian Satellite-Based Augmentation System (India) are a few. These are all operated by their respective region's governing body for aviation.
SBAS systems use a network of reference stations, satellite links, and ground-based master stations to collect GNSS measurements, compute correction data, and broadcast them to user receivers via geostationary satellites. GNSS receivers equipped with SBAS capability receive these correction messages, which enable them to enhance their accuracy and reliability.
Correction Data
Data Format
Data Transmission
Corrections Services
Precision Timing
Time
We sometimes think of ourselves living in a 3D world, but time is another dimension to our space we don't always remember. An event happens at a location that can be defined in x, y, and z coordinates, but cannot be pinpointed in spacetime unless t is also defined. Time is an integral part of the way we experience space, which makes it the fourth dimension to our universe.
This means that precise time measurement is as necessary to science as measuring three-dimensional space. Keeping time is just as important as understanding it, and humans have been inventing increasingly complex ways to measure time since the sundial, all the way up to the atomic clock and beyond.
Disciplined Oscillators
A disciplined oscillator is an ulta-precise clock or frequency reference that combines GNSS technology with an internal stable oscillator. The oscillator is controlled to agree with time signals received from GNSS satellites, whose on-board clocks are incredibly accurate. Since the oscillators are so stable, resolution between satellite pings can approach a picosecond, or one trillionth of a second.
Precision Timing Applications
What types of industries and projects need timing accuracy this precise?
Quantum and Physics Laboratories
Sub-nanosecond timing in a research or laboratory setting can lead to important research breakthroughs, especially in the quantum field.
Precision Metrology
Because the speed of light is a fundamental constant, precise time measurements lead to ultra-precise distance measurements.
Telecom and Network Operations
Cellular networks and data centers rely on precise timing for synchronization and data protection.
Critical Infrastructure
Power utilities, financial institutions, and transportation systems rely on precise timing for synchronization and navigation.
Security
Precise timestamps can provide authentication and replay protection as well as provide forensic insight to data breaches and hacks.
Navigation
Using satellite navigation, a 1-nanosecond error translates to about 30 centimeters of location error. Accurate timing maintains GNSS data integrity.